Hydrology — Flooding Simulation
The flooding module provides a set of functions to simulate the presence and dynamics of water bodies over a terrain. These algorithms are designed to estimate realistic water distribution, depth, and drainage behavior from different types of initial conditions (lakes, rivers, rainfall accumulation, or boundary inflows).
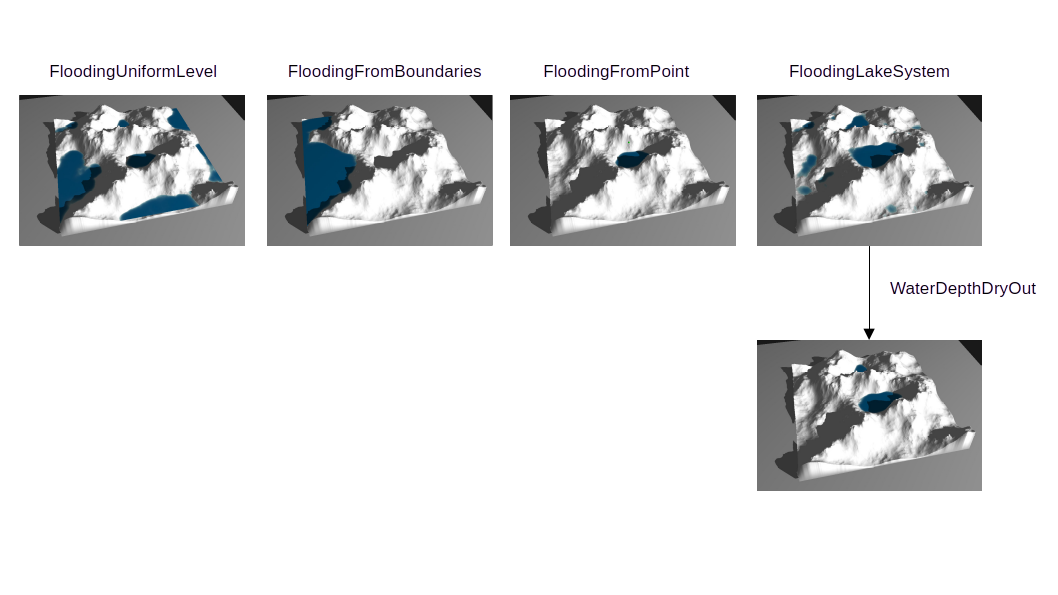
FloodingUniformLevel
Computes water depth assuming a uniform flooding level across the terrain. Each cell’s depth is the difference between the water level and the local elevation (clamped to zero when below the terrain).
Use case: Simulating global or large-scale flood scenarios, even inland.
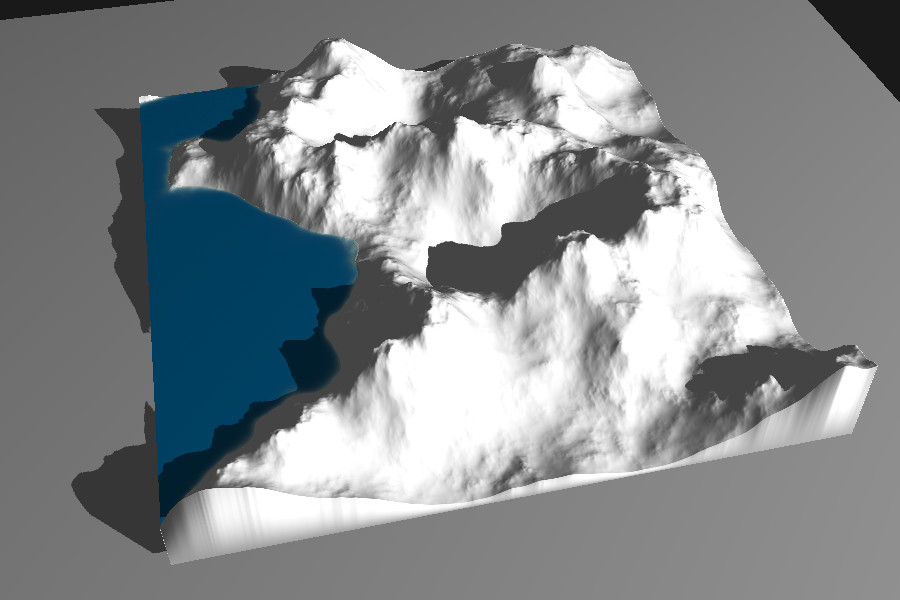
FloodingFromBoundaries
Simulates flooding that starts from the terrain boundaries. This function:
- Identifies the lowest elevation points along selected boundary regions.
- Propagates water inward from these entry points until a reference water level is reached.
- Can be used to model coastal flooding, tidal inflows, or boundary-connected lakes.
Use case: Estimating inundation zones from sea-level rise or open-boundary reservoirs.
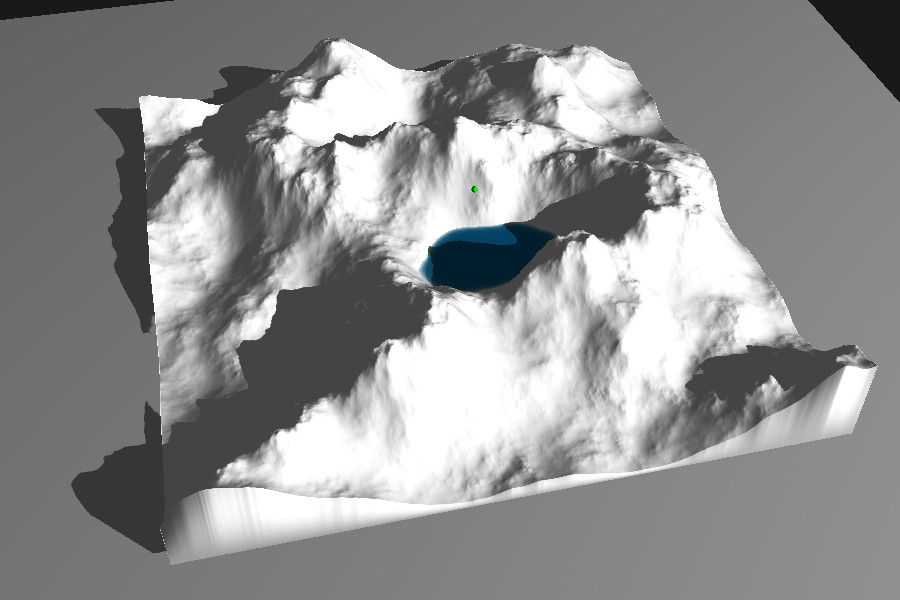
FloodingFromPoint
Floods the terrain from one or more seed points, simulating water spreading outward until equilibrium. Each seed acts as a localized source of water, rising to the target level based on local elevation gradients.
Use case: Modeling localized flooding events such as rainfall accumulation or spring-fed basins.
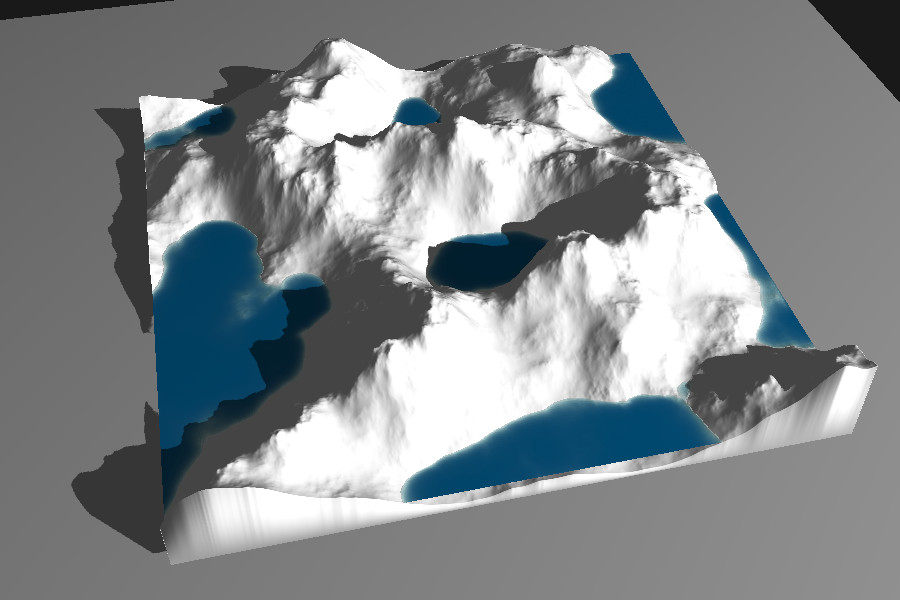
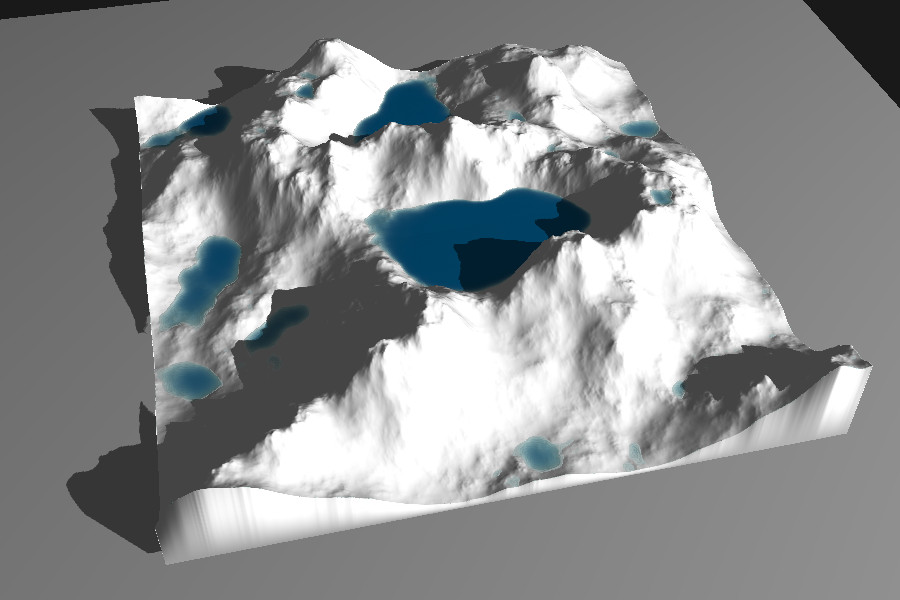
FloodingLakeSystem
Estimates lake formation and water depth by iteratively filling terrain depressions. The algorithm:
- Detects topographic basins (closed catchments).
- Fills them until spillover occurs or a target level is reached.
- Produces a continuous water depth map for each lake.
Use case: Deriving lake systems.
WaterDepthDryOut
Applies a drying factor to an existing water depth field. This function:
- Multiplies each water depth value by a user-defined
dry_out_ratio(e.g., 0.1 to reduce by 10%). - Optionally applies drying only where a mask is non-zero, allowing selective reduction.
Use case: Modeling drying of shallow water regions.
WaterMask
Generates a binary or smooth mask representing the presence of water.
There are two main variants:
- Binary water mask: Converts the given water depth field into a binary array, where non-zero values indicate water presence.
- Smooth transition mask: Computes a gradual mask of regions that would be flooded if the water level increased by a given increment.
Use case: Distinguishing land/water areas for texturing for example.
WaterDepthFromMask
Computes continuous water depth over masked terrain regions using harmonic interpolation. This produces a physically plausible water surface consistent with the surrounding terrain and boundary conditions.
Use case: Reconstructing water depth from observed or simulated flood masks, ensuring smooth water surface gradients.